C.1 Beschreibung von Veränderung
Ziel der Physik ist es, das Verhalten eines Systems vorherzusagen. In einigen wenigen einfachen Systemen genügt es, den Zeitpunkt in eine Gleichung einzusetzen, und wir erhalten sofort eine Antwort auf die gestellte Frage, wenn wir die Gleichung lösen. Ein Beispiel für solch ein einfaches System ist die gedämpfte harmonische Schwingung.
In den meisten Fällen kennen wir keine Formel, mit der wir den zukünftigen Zustand des Systems direkt berechnen können. In der Fachsprache heißt das: „Es gibt keine geschlossene Lösung für das Problem“. Ein bekanntes Problem, bei dem es keine geschlossene Lösung gibt, ist das Drei-Körper-Problem.
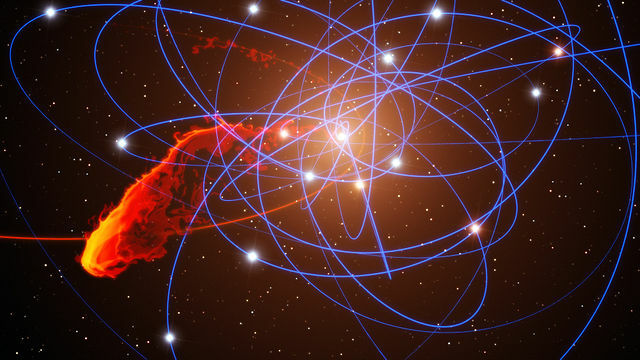
Vielfach kennen wir aber Formeln dafür, wie sich eine Größe mit der Zeit ändert. Ist das der Fall, können wir mithilfe einer Computer-Simulation näherungsweise den Zustand des Systems vorhersagen. In Bild C.2 siehst du als Beispiel die Simulation einer Gaswolke in der Nähe eines schwarzen Lochs.
C.1.1 Bewegungssimulation
In diesem Abschnitt werden wir uns auf die Änderung von Ort, Geschwindigkeit und Beschleunigung beschränken. Das Prinzip lässt sich jedoch auf jede zeitlich veränderliche Größe anwenden.
Zunächst wiederholen wir die Definition der mittleren Beschleunigung und die der mittleren Geschwindigkeit.
\[ \vec{a} = \frac{\Delta\vec{v}}{\Delta t} \qquad\qquad \vec{v} = \frac{\Delta\vec{s}}{\Delta t} \]
Multiplizieren wir beide Gleichungen mit \(\Delta t\) erhalten wir:
\[\begin{equation} \Delta\vec{v} = \vec{a} \cdot \Delta t \qquad\qquad \Delta\vec{s} = \vec{v} \cdot \Delta t \tag{C.1} \end{equation}\]
Mithilfe dieser Gleichungen können wir:
- Die Änderung der Geschwindigkeit \(\Delta\vec{v}\) eines Körpers während eines kurzen Zeitintervalls \(\Delta t\) berechnen, wenn die Beschleunigung konstant ist.
- Die Änderung des Ortes \(\Delta\vec{s}\) eines Körpers während eines kurzen Zeitintervalls \(\Delta t\) berechnen, wenn die Geschwindigkeit konstant ist.
Kennen wir den Ort und die Geschwindigkeit zu einem Zeitpunkt \(t\), können wir mithilfe dieser Änderungen den Ort und die Geschwindigkeit zu dem späteren Zeitpunkt \(t+\Delta t\) näherungsweise berechnen:
\[ \begin{aligned} \vec{s}_{t+\Delta t} = {} & \vec{s}_{t} + \vec{v}_t \cdot \Delta t\\ \vec{v}_{t+\Delta t} = {} & \vec{v}_{t} + \vec{a} \cdot \Delta t\\ \end{aligned} \]
Hinweis: Für die Berechnung des Ortes hättest du auch die Geschwindigkeit \(\vec{v}_{t+\Delta t}\) verwenden können. Ist der Zeitschritt klein, macht das keinen nennenswerten Unterschied.
Je kleiner wir das Intervall \(\Delta t\) wählen, desto kleiner wird der Fehler und desto genauer das Ergebnis.
C.1.2 Bocksprung-Verfahren
In der numerischen Integration – einem Teilgebiet der Mathematik – geht es um Methoden, wie sich kontinuierliche Vorgänge mit diskreten Schritten möglichst gut annähern lassen.
Das Verfahren, das du im letzten Abschnitt kennengelernt hast, um von einem Zeitschritt zum nächsten zu gelangen, heißt Euler-Verfahren (engl. Euler algorithm). Dieses Verfahren hat den Nachteil, dass es bei manchen Simulationen sehr bald sehr stark von den tatsächlichen Werten abweicht –- der kleine Fehler, der bei jedem Berechnungsschritt auftritt, schaukelt sich stark auf.
Das Euler-Verfahren ist aber nur eines von vielen möglichen Näherungsverfahren. Ein besseres Verfahren – das fast genauso einfach ist – heißt Bocksprung-Verfahren (engl. leapfrog integration). Dabei werden Ort und Geschwindigkeit nicht zum selben Zeitpunkt berechnet, sondern um einen halben Zeitschritt versetzt, ähnlich wie das zeitversetzte Springen beim Bockspringen (Bild C.3).

Die Gleichungen lauten:
\[ \begin{aligned} \vec{s}_{t+\Delta t} &= \vec{s}_t + \vec{v}_{t+\frac{1}{2}\cdot\Delta t}\cdot \Delta t\\[.3em] \vec{v}_{t+\frac{3}{2}\Delta t} &= \vec{v}_{t+\frac{1}{2}\cdot\Delta t} + \vec{a}_{t+\Delta t} \cdot\Delta t \end{aligned} \]
mit den Startwerten \(x_{0}\) und \(v_{\frac{1}{2}\cdot\Delta t}\).
Warum das Bocksprung-Verfahren bei gleichem Zeitintervall in den meisten Fällen ein besseres Ergebnis liefert, zeigt dir Bild C.4: Der mittlere Geschwindigkeitsvektor \(\vec{v}_m\) entspricht eher dem Momentangeschwindigkeitsvektor in der Intervallmitte (\(\vec{v}(1{,}5)\)) als denen an den Intervallgrenzen (\(\vec{v}(1)\)) und (\(\vec{v}(2)\)). Dadurch wird der Fehler im Allgemeinen kleiner und die Simulation genauer.

C.1.3 Grenzen der Berechenbarkeit
Nicht nur der Fehler, der sich bei dem schrittweisen Berechnen der zukünftigen Zustände ergibt, begrenzt die Möglichkeit der Vorhersage. Auch die Ungenauigkeit der Anfangsbedingungen kann ein Problem sein.
In Bild C.5 siehst du zwei unterschiedliche mechanische Systeme. Im oberen System führt eine kleine Abweichung des Abschusswinkels auch noch nach mehreren Reflexionen zu einem sehr ähnlichen Endzustand. Systeme mit dieser Eigenschaft besitzen eine starke Kausalität zwischen Ursache und Wirkung.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Im System unten führt bereits eine minimale Änderung des Abschusswinkels schon nach wenigen Reflexionen zu einem komplett anderen Endzustand. Systeme mit dieser Eigenschaft besitzen eine schwache Kausalität zwischen Ursache und Wirkung (chaotische Systeme).
Im Alltag wird der Begriff Chaos oft für einen Zustand totaler Unordnung verwendet. In der Chaosforschung bezeichnet er aber ein prinzipiell berechenbares System, das allerdings sehr empfindlich auf Anfangsbedingungen reagiert. Chaotische Systeme sind also weder „regellos“ noch „vollkommen unberechenbar“.
Bekannte chaotische Systeme mit schwacher Kausalität sind zum Beispiel:
- das Doppelpendel
- das magnetische Pendel
- das Wetter
Alle Systeme, bei denen sehr viele Teilchen wechselwirken, verhalten sich langfristig fast immer chaotisch, auch wenn sie am Anfang starke Kausalität zeigen (Schmetterlingseffekt). Das ist auch der Grund, warum Wettervorhersagen für den nächsten Tag sehr genau sind, aber langfristige Vorhersagen über Wochen hinweg fast unmöglich.
Links:
- Video: Doppelpendel Versuch
