2.5 Messen
Die Frage, ob ein physikalisches Modell zutrifft oder nicht, lässt sich nur durch das Experiment beantworten. Dazu müssen die im Modell vorkommenden Größen gemessen werden. Du denkst dir vielleicht: Einfach den Wert am Messgerät ablesen und fertig (Bild 2.23).

Nun, so leicht ist die Sache meistens nicht! Keine Messung ist exakt. Wenn eine Größe gemessen wird, hängt das Ergebnis vom Messgerät, dem Messverfahren, dem Geschick des Messenden, der Umgebung und anderen Einflüssen ab. Auch wenn die Größe mehrmals auf die gleiche Weise und unter den gleichen Umständen gemessen wird, unterscheiden sich die einzelnen Messwerte in den meisten Fällen geringfügig. Und auch wenn wir all diese Unsicherheiten ausschalten könnten: Um 1930 hat Werner Heisenberg die Unschärferelation entdeckt. Sie besagt, dass es für bestimmte physikalische Größen eine prinzipielle Grenze gibt, wie genau sie gemessen werden können. Diese Grenze ist allerdings sehr, sehr klein. Du siehst also:
| Messunsicherheit ist ein unvermeidbarer Bestandteil des Messens. |
Trotz Unsicherheit ist ein Messwert nützlich, solange die Unsicherheit einer Messung zahlenmäßig angegeben werden kann!
In diesem Kapitel geht es um das Vermeiden von Fehlern bei Messungen, den Umgang mit und der Bedeutung von Messunsicherheit und der Fortpflanzung von Messunsicherheit in Rechnungen.
2.5.1 Messfehler
Vielleicht ist es dir auch schon einmal passiert: Beim Ablesen der Anzeige eines Messgeräts hast du versehentlich die Werte von der falschen Skala erwischt oder Ähnliches. Fehler passieren leider. Sie lassen sich aber durch genaues Arbeiten und gute Vorbereitung prinzipiell vermeiden. Bei Fehlern kann zwischen zwei Arten unterschieden werden:
Grobe Fehler: Damit sind Fehler gemeint, die deine Messung unbrauchbar machen. Zum Beispiel hast du vor der Messung vergessen, den Deckel des Gefäßes zu schließen. Während der einzelnen Messungen ändert sich die Temperatur auf unkontrollierte Weise. Da hilft nur eines: Zurück zum Start und eine neue Messreihe beginnen.
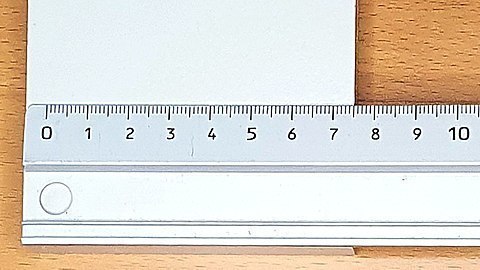
Systematische Fehler (engl. systematic errors): Bei dieser Art von Fehlern sind zwar auch alle Messwerte falsch, du hast aber noch einmal Glück gehabt. Nehmen wir an, du hast bei der Messung von Längen die Kante des Lineals statt der Null-Markierung mit der Kante des Brettes ausgerichtet (Bild 2.24). Dann ist jede gemessene Länge um denselben Betrag zu kurz. Diese Messung kannst du „retten“, indem du zu jedem Messwert diesen Betrag dazuzählst. Systematische Fehler lassen sich bei der Auswertung noch korrigieren, weil die Abweichung für alle Messergebnisse gleich ist. Diese Art von Fehlern ist jedoch oft schwer zu finden. Meist ist eine andere, unabhängige Messmethode notwendig, um sie zu erkennen.
2.5.2 Absoluter und relativer Fehler
Das Wort „Fehler“ hat viele unterschiedliche Bedeutungen. Selbst in der Wissenschaft wird das Wort nicht immer eindeutig verwendet. Zum Beispiel wird die Messunsicherheit in älteren Texten als „Messfehler“ bezeichnet. Hier verwenden wir das Wort Fehler für die Differenz zwischen gemessenem und wahrem Wert (engl. actual value).
Zum Beispiel möchtest du die Anzahl der Zuschauer bei einem Konzert bestimmen. Die Leute stehen dicht gedrängt und bewegen sich. Auf den ersten Moment findest du keine Möglichkeit, die Personen zu zählen. Dann entdeckst du, dass der Boden aus rechteckigen Platten besteht und sich ungefähr \(3\) Personen auf jeder Platte befinden. Da der Raum aus \(20\) mal \(40\) Platten besteht, folgerst du, dass sich
\[ 40 \cdot 20 \cdot 3 = 2400 \]
Zuschauer auf dem Konzert befunden haben. Die Security am Eingang verrät dir nach der Vorstellung, dass exakt \(2450\) Personen den Zuschauerraum betreten haben.
Als absoluter Fehler wird der Absolutbetrag der Differenz von gemessenen und wahrem Wert bezeichnet:
| \[\begin{equation} \text{absoluter Fehler} = |\text{gemessener Wert}-\text{wahrer Wert}| \tag{2.2} \end{equation}\] |
In unserem Beispiel mit den Konzertbesuchern beträgt der absolute Fehler:
\[ |2400\;\text{Personen}-2450\;\text{Personen}| = 50\;\text{Personen} \]
Bildest du das Verhältnis von absolutem Fehler und wahrem Wert, erhältst du den relativen Fehler. Er wird üblicherweise in Prozent angegeben. Die Formel dafür lautet:
| \[\begin{equation} \text{relativer Fehler} = 100 \cdot \frac{|\text{gemessener Wert}-\text{wahrer Wert}|}{\text{wahrer Wert}} \tag{2.3} \end{equation}\] |
In unserem Beispiel mit den Konzertbesuchern beträgt der relative Fehler:
\[ \frac{|2400\;\text{Personen}-2450\;\text{Personen}|}{2450\;\text{Personen}} = 2{,}04\ldots\,\% \]
Beachte, dass die Begriffe absoluter und relativer Fehler nur dann sinnvoll sind, wenn ein wahrer Wert bekannt ist. Ist dieser unbekannt, lässt sich diese Methode eigentlich nicht anwenden.
Wird eine kontinuierliche Größe in der Natur gemessen, können wir davon ausgehen, dass unsere Messung nicht exakt ist. Die Werte, die du in Nachschlagewerken findest, sind mit großem Aufwand von unterschiedlichen Forschergruppen ermittelt und verglichen worden. Dieser allgemein akzeptierte Wert oder Literaturwert (engl. accepted value) gilt als beste Näherung für den tatsächlichen Wert einer Größe. Bei bekannten Größen kannst du daher statt des wahren Wertes den akzeptierten Wert für die Fehlerberechnung verwenden.
2.5.3 Angabe von Messunsicherheit
Für die Angabe von Messwert und Messunsicherheit findest du zwei gebräuchliche Schreibweisen:
- \(\text{Messwert}\pm\text{Messunsicherheit}\)
- \(\text{Messwert}(\text{Messunsicherheit})\)
Die folgenden zwei Beispiele beschreiben denselben Messwert und dieselbe Messunsicherheit:
- \(10{,}50\pm0{,}01\)
- \(10{,}5(1)\)
Die Zahlen in der Klammer sind also nicht Teil des Messwerts, sondern eine Schreibweise für die Messunsicherheit!
Vermutlich wunderst du dich über die Angabe der Vakuum-Lichtgeschwindigkeit mit \(2.9979246\cdot 10^{8}\;\mathrm{m/s}\) und der Elementarladung (Ladung eines Protons) mit \(1.6021766\cdot 10^{-19}\;\mathrm{C}\). Wie kann es bei so extremen Messwerten zu keiner Unsicherheit kommen? Der Grund dafür ist, dass im Jahr 2019 einige Naturkonstanten im Rahmen des Internationalen Einheitensystems als exakt festgelegt wurden und es sich somit um keine Messwerte mehr handelt. Alle darauf aufbauenden Größen und Naturkonstanten haben aber eine Messunsicherheit.
2.5.4 Signifikante Stellen
Wird bei einem Messwert keine explizite Angabe zur Messunsicherheit gemacht, ist die letzte angegebene Ziffer die letzte zuverlässige (signifikante) Stelle (engl. significant figures) des Messwerts. Ist etwa ein Messwert mit \(3{,}10\;\mathrm{m}\) angegeben, entspricht das einer Messunsicherheit von \(3{,}10 \pm 0{,}005\;\mathrm{m}\).
Bei dieser Art der Angabe ist die Unsicherheit einer Messung immer auf eine halbe Zehnerpotenz (\(\pm0{,}5\), \(\pm0{,}05\), \(\pm0{,}005\), \(\ldots\)) begrenzt. Eine Messunsicherheit von zum Beispiel \(1\pm0{,}25\) ist nicht mit signifikanten Stellen darstellbar.
Beachte: Die Zahlen \(3{,}1\) und \(3{,}100\) sind zwar mathematisch gleich, im Zusammenhang mit Messwerten beschreiben sie aber Unterschiedliches: Während \(3{,}1\;\mathrm{m}\) einer Messung auf Dezimeter genau entspricht (\(3{,}1\pm0{,}05\;\mathrm{m}\)), bedeutet \(3{,}100\;\mathrm{m}\) eine Messung auf Millimeter genau (\(3{,}100\pm0{,}0005\;\mathrm{m}\))!
2.5.5 Unsicherheit bei analogen Messinstrumenten
Das Wort analog bedeutet „stufenlos“ oder „kontinuierlich“. Analoge Messinstrumente, wie ein Lineal, haben eine aufgedruckte Skala mit Teilstrichen und daneben aufgedruckten Zahlen. Weitere Beispiele für analoge Messinstrumente sind Maßbänder, Federwaagen zum Messen von Kräften, Balkenwaagen oder Flüssigkeitsthermometer.
Misst du die Länge eines Nagels mit einem Lineal (Bild 2.26, c), wird die zu messende Länge immer zwischen zwei Markierungen der Skala liegen. Ein exaktes Ablesen ist selbst dann unmöglich, wenn die Kante mit einem Skalenstrich zusammenfällt, denn auch die Teilungsstriche selbst haben eine Breite.

Neben der Unsicherheit bei der Ablesung kommt es auch bei der Herstellung des Lineals schon zu Ungenauigkeiten. Zum Beispiel ist der \(10\;\mathrm{cm}\)-Strich bei keinem Lineal exakt im Abstand von \(10\;\mathrm{cm}\) (Eichunsicherheit, a) und auch die Unterteilungsstriche der Skala können nie \(100\,\%\) gleich weit voneinander entfernt sein (Linearisierungsunsicherheit, b).
2.5.6 Angabe von Unsicherheit bei analogen Messinstrumenten
Ist auf dem Messinstrument nichts anderes angegeben, wählst du als Intervallbreite der Messunsicherheit die kleinste ablesbare Einheit.

In Bild 2.26 siehst du die Messung der Breite eines Holzbretts mit einem Lineal. Auch wenn du keinen exakten Wert ablesen kannst: Die „wahre“ Breite des Bretts wird ziemlich sicher zwischen \(9{,}2\;\mathrm{cm}\) und \(9{,}3\;\mathrm{cm}\) liegen. Wir können das folgendermaßen ausdrücken: Als Messwert \(x\) wählen wir den Mittelwert zwischen minimalem und maximalem Wert.
| \[\begin{equation} x = \frac{\text{maximal möglicher Wert}+\text{minimal möglicher Wert}}{2} \tag{2.4} \end{equation}\] |
Als Unsicherheit \(\Delta x\) wählen wir den halben Abstand von maximalen und minimalen Wert.
| \[\begin{equation} \Delta x = \frac{\text{maximal möglicher Wert}-\text{minimal möglicher Wert}}{2} \tag{2.5} \end{equation}\] |
Für unser Beispiel ergibt sich dann:
\[ x = \frac{9{,}3\;\mathrm{cm}+9{,}2\;\mathrm{cm}}{2} = 9{,}25\;\mathrm{cm} \]
Und:
\[ \Delta x = \frac{9{,}3\;\mathrm{cm}-9{,}2\;\mathrm{cm}}{2} = 0{,}05\;\mathrm{cm} \]
Damit kann die Breite des Brettes mit \(9{,}25\pm0{,}05\;\mathrm{cm}\) angegeben werden.
Sollte ein Skalenstrich sehr genau mit dem abzulesenden Wert übereinstimmen, nimm als Messwert den Wert beim Skalenstrich und als Unsicherheit das halbe Intervall zwischen zwei Skalenstrichen. Würde zum Beispiel das Ende des Brettes mit dem Skalenstrich von \(4{,}6\;\mathrm{cm}\) zusammenfallen, lautet das Ergebnis der Messung \(4{,}6\pm0{,}05\;\mathrm{cm}\).
2.5.7 Unsicherheit bei digitalen Messinstrumenten
Im Gegensatz zu analogen Messgeräten werden die Zahlen auf dem digitalen Display deutlich angezeigt und es gibt keine Unsicherheit bei der Ablesung. Aber auch bei digitalen Messgeräten kommt es zu Messunsicherheiten. Die Anzahl der Ziffern am Display ist begrenzt, der interne Schaltkreis muss das Ergebnis also runden. Das Wort digital bedeutet nämlich „gestuft“ oder „diskret“ (vom lateinischen Wort digitus für „Finger“). Die kleinste numerische Abstufung, die auf einer digitalen Anzeige dargestellt werden kann, wird als Auflösung (engl. resolution) bezeichnet.
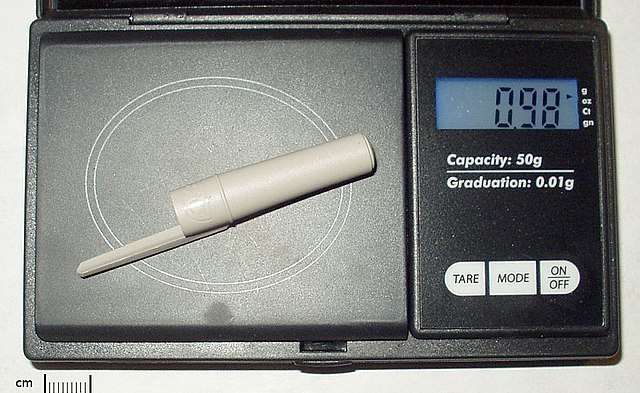
In Bild 2.27 siehst du die Messung der Masse eines Körpers mithilfe einer Digitalwaage. In der Anzeige ist ein Wert von \(0{,}98\;\mathrm{g}\) zu sehen. Die Auflösung ist mit \(0{,}01\;\mathrm{g}\) auf der Waage angegeben. Die Anzeige zeigt also die signifikanten Stellen. Messwert mit Messunsicherheit lauten daher: \(0{,}98\pm0{,}005\;\mathrm{g}\).
Zusätzlich zu der begrenzten Anzahl an darstellbaren Stellen kann es bei digitalen Messgeräten noch weitere Unsicherheiten geben, zum Beispiel, wenn Sensoren temperaturempfindlich sind. Informationen dazu findest du im Handbuch des jeweiligen Gerätes oder auf der Website des Herstellers.
2.5.8 Anwendungsbeispiel zur Messung mit einem Digital-Multimeter
Du misst mit einem Multimeter den Widerstand zwischen zwei Punkten in einem Widerstandsnetzwerk. Die Anzeige zeigt den Wert \(3.456\;\mathrm{k\Omega}\). Berechne die Messunsicherheit anhand der technischen Spezifikation des Multimeters.
Am Datenblatt des Multimeters findest du folgende Angaben (Bild 2.28):

Sinnvollerweise wurde für die Messung der Bereich \(6{,}000\;\mathrm{k\Omega}\) verwendet. In dieser Zeile finden wir die Genauigkeit mit \(\pm(0.9\,\%+1)\) angegeben. Die Messunsicherheit setzt sich aus zwei Anteilen zusammen. Der erste Teil besteht aus einem prozentuellen Wert des Messwerts. Der zweite Teil ist ein fixer Wert in Form von Zählimpulsen (engl. counts, kurz cts) angegeben. Mit dieser Angabe ist das Vielfache der Auflösung (2. Spalte) gemeint. Zusammen erhalten wir:
\[ \begin{aligned} u = {} & 3.456\cdot0.9/100+1\cdot0.001 \\ = {} & 0.032104 \\ \end{aligned} \]
Messunsicherheiten werden immer bis zur letzten messbaren Stelle aufgerundet (hier \(3\) Nachkommastellen). Damit erhalten wir als Ergebnis:
\[ R = 3.456\pm0.033\;\mathrm{k\Omega} \]
2.5.9 Zufallsbedingte Messabweichungen
Stell dir vor, du musst Rundenzeiten bei einem Rennen mit einer Stoppuhr messen (Bild 2.29).

Egal wie sehr du dich bemühst, du wirst nie exakt den Knopf deiner Stoppuhr drücken, wenn der Läufer die Ziellinie passiert. Einmal wird es einen Augenblick zu früh sein, ein anderes Mal ein wenig zu spät.
Diese zufällige Abweichung der Messwerte wird auch als zufallsbedingter Messfehler (engl. random error) bezeichnet. Im Gegensatz zu systematischen Fehlern lassen sich zufallsbedingte Messfehler nicht korrigieren!
Deine Reaktionszeit als Quelle für Unsicherheit ließe sich zwar durch die Messung mithilfe einer Lichtschranke ausschalten, aber: Jedes Messgerät (egal ob analog oder digital) beinhaltet ebenfalls Quellen von Messunsicherheiten.
2.5.10 Auswertung von Messreihen
Weichen die Messwerte bei wiederholten Messungen voneinander ab, können wir mithilfe von Statistik auf einen Messwert und eine Messunsicherheit kommen. Wenn Statistik neu für dich ist, werden dir die Erläuterungen zu den Formeln in diesem Abschnitt nichts sagen. Du kannst sie aber trotzdem als eine Art „Kochrezept“ für die Auswertung deiner Messreihen verwenden.
Im Folgenden gehen wir davon aus, dass du nach einem Experiment \(n\) Messungen mit den Werten \(x_1, x_2, \ldots, x_n\) hast.
Überlagern sich viele kleine unabhängige Zufallseffekte zu einem Gesamteffekt, sind die Messwerte nach dem zentralen Grenzwertsatz zumindest näherungsweise normalverteilt. Die beste Näherung (Schätzwert) für den unbekannten wahren Wert ist dann der empirische Mittelwert \({\overline {x}}\) (engl. sample mean) der Messwerte:
\[\begin{equation} {\overline {x}} ={\frac {1}{n}}\sum_{i=1}^{n}x_{i} =\frac{x_{1}+x_{2}+x_{3}+\ldots+x_{n}}{n} \tag{2.6} \end{equation}\]
Den besten Schätzwert für die Messunsicherheit \(s_{\overline {x}}\) (Schwankungsbreite des Mittelwertes) erhalten wir aus der korrigierten empirischen Standardabweichung \(s\) (engl. unbiased sample variance) der Messreihe. Die Formel lautet:
\[\begin{equation} \begin{aligned} s_{\overline {x}} = {} &\frac{1}{\sqrt{n}}\cdot s\\ = {} & \frac{1}{\sqrt{n}}\cdot \sqrt{\frac{1}{n-1}\cdot\sum \limits_{i=1}^{n}\left(x_{i}-{\overline {x}}\right)^{2}}\\ = {} & \sqrt{\frac{1}{n\cdot(n-1)}\cdot\sum \limits_{i=1}^{n}\left(x_{i}-{\overline {x}}\right)^{2}}\\ \end{aligned} \tag{2.7} \end{equation}\]
Unser Messergebnis mit Messunsicherheit lautet dann:
\[ x = {\overline {x}} \pm s_{\overline {x}} \]
2.5.11 Anwendungsbeispiel: Messreihenauswertung
Als Beispiel verwenden wir den folgenden Datensatz von Messwerten:
\[ \{2{,}5; 2{,}8; 2{,}2; 2{,}3; 2{,}2; 2{,}7; 2{,}6; 2{,}4\} \]
Diesen können wir in einer Tabellenkalkulation (hier LibreOffice Calc) nach den Formeln im letzten Abschnitt auswerten. Jede Tabellenkalkulation enthält bereits Funktionen für die Berechnung von Mittelwert und Standardabweichung. Das Tabellenblatt mit den Messwerten und den verwendeten Formeln siehst du in Bild 2.30. Beachte die Funktion STABW.S(); sie berechnet die Standardabweichung mit dem für uns benötigten Nenner \((n-1)\).

Das Ergebnis der Auswertung ist \(x = 2{,}46 \pm 0{,}08\).
Links:
2.5.12 Bedeutung der Messunsicherheit
Was genau bedeutet jetzt die Angabe \({\overline {x}} \pm s_{\overline {x}}\) bei zufallsbedingten Messabweichungen? In der Physik wird dieser Ausdruck häufig im Sinne des Bayesschen Wahrscheinlichkeitsbegriffs gedeutet. Die mathematische Statistik liefert dazu folgende Werte: Umfasst der Datensatz mindestens 12 Messwerte, gilt:
| Die Wahrscheinlichkeit, dass sich die nächste Messung im Intervall \([{\overline {x}} - s_{\overline {x}},{\overline {x}} + s_{\overline {x}}]\) befindet, ist rund \(2/3\) oder \(68\,\%\) (Überdeckungswahrscheinlichkeit). |
Was sehr interessant an dieser Deutung ist: Der Begriff des „wahren Werts“ kommt darin gar nicht vor. Es wird nur auf erfolgte oder zukünftige Messwerte Bezug genommen. Daher eignet sich diese Definition auch für Fälle, in denen es keinen wahren Wert geben kann, wie in der Quantenmechanik.
Was ändert sich jetzt durch die Anzahl der Messungen? In Bild 2.31 siehst du ein Beispiel einer konkreten Messung, wie sich die Werte für die Messunsicherheit (Schwankungsbreite des Mittelwertes) mit Zunahme der Anzahl der Messwerte ändern. Am Anfang, bei wenigen Messwerten, „springen“ die Werte für die Messunsicherheit noch ziemlich herum. Daher gilt als Faustregel für die Praxis: mindestens 12 Messungen pro Messreihe!

Die Kurve wird allerdings rasch flacher und nähert sich der Achse asymptotisch. Ob du 100 oder 200 Messwerte verwendest, verbessert kaum noch die Genauigkeit des Ergebnisses.
Auf das „Vertrauensniveau“ der Messunsicherheit von rund \(68\,\%\) hat die Zunahme der Messwerte dabei (fast) keine Auswirkung. Ein größeres Vertrauensniveau kannst du nur durch ein Vergrößern des Intervalls um den Mittelwert erreichen. Um das in der Wissenschaft übliche Vertrauensniveau von \(95\,\%\) zu erreichen, muss ein doppelt so großes Intervall von
\[ [{\overline {x}} - 2\cdot s_{\overline {x}},{\overline {x}} + 2\cdot s_{\overline {x}}] \]
gewählt und ein Minimum von 30 Messungen durchgeführt werden.
2.5.13 Messunsicherheit in Diagrammen
In Diagrammen wird der Messwert und die Unsicherheit oft durch einen Fehlerbalken (engl. error bar) dargestellt (Bild 2.32).
Der Messwert erscheint im Diagramm als Punkt, die Unsicherheit als Strecken oben und unten (oder links und rechts) vom Messwert. Die Länge der Strecke entspricht der Größe der Unsicherheit. In wissenschaftlichen Arbeiten entspricht die dargestellte Messunsicherheit einem Vertrauensniveau von \(95\,\%\) (siehe Bedeutung der Messunsicherheit).

Die blaue Linie im Bild zeigt die durch die Relativitätstheorie vorhergesagte Zerfallskurve von sehr schnellen Myonen (instabile Teilchen). Die Messungen in einem Speicherring am CERN liefert augenscheinlich eine ausgezeichnete Übereinstimmung mit der Modellrechnung.
2.5.14 Summen von Messwerten
Oft ist eine Größe in einer Formel nicht direkt messbar und setzt sich aus mehreren messbaren Größen zusammen. Zum Beispiel benötigst du für die Bestimmung der Durchschnittsgeschwindigkeit eine Längenmessung und eine Zeitmessung – beide mit Messunsicherheiten.
Gibt es mehrere Messwerte in einer Rechnung, kommt es zu einer Fortpflanzung der Messunsicherheiten (engl. propagation of uncertainty). Dabei gilt immer: Die Unsicherheit des Ergebnisses ist immer größer als die Unsicherheiten der einzelnen Messwerte! Die einfachste Methode besteht darin, immer die größtmögliche Unsicherheit zu ermitteln, die sich durch eine Berechnung ergeben kann.
Nehmen wir zum Beispiel zwei Bretter mit den Längen \(135\pm1\;\mathrm{cm}\) und \(165\pm1\;\mathrm{cm}\). Wie lange ist dann das Brett, wenn wir beide zusammenhängen? Die größtmögliche Länge erhalten wir durch:
\[ (135+1) + (165+1)\;\mathrm{cm} = 302\;\mathrm{cm} \]
Und die kleinstmögliche Länge ist:
\[ (135-1) + (165-1)\;\mathrm{cm} = 298\;\mathrm{cm} \]
Wir können die Gesamtlänge also mit \(300\pm2\;\mathrm{cm}\) angeben.

Genau dieses Ergebnis erhalten wir auch, wenn wir Messwerte und Messunsicherheiten getrennt voneinander addieren (Bild 2.33). Haben wir zwei Messwerte \(x\) und \(y\) mit den Messunsicherheiten \(\Delta x\) und \(\Delta y\) gilt für die Addition von Messwerten:
| \[\begin{equation} (x+\Delta x) + (y+\Delta y) = (x+y)\pm(\Delta x+\Delta y) \tag{2.8} \end{equation}\] |
Mit der gleichen Überlegung ergibt sich die Formel für die Subtraktion von Messwerten:
| \[\begin{equation} (x+\Delta x) - (y+\Delta y) = (x-y)\pm(\Delta x+\Delta y) \tag{2.9} \end{equation}\] |
Sowohl bei der Addition als auch bei der Subtraktion von Messwerten erhalten wir die Gesamtunsicherheit aus der Summe der einzelnen Unsicherheiten.
2.5.15 Produkte von Messwerten
Wie bei der Fortpflanzung von Messunsicherheiten bei Strichrechnungen überlegen wir uns wieder die größtmögliche Abweichung, die sich bei der Multiplikation von zwei Messwerten ergeben kann (Bild 2.34).
Haben wir ein Brett mit der Breite \(B=55\pm1\;\mathrm{cm}\) und der Länge \(L=165\pm1\;\mathrm{cm}\), erhalten wir für die größtmögliche Fläche den Wert:
\[ (55+1)\;\mathrm{cm} \cdot (165+1)\;\mathrm{cm} = 9296\;\mathrm{cm}^2 \]
Und die kleinstmögliche Fläche ist:
\[ (55-1)\;\mathrm{cm} \cdot (165-1)\;\mathrm{cm} = 8856\;\mathrm{cm}^2 \]
Mit einem symmetrischen Intervall können wir das Ergebnis als \(9076\pm220\;\mathrm{cm}^2\) angeben.

.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
{kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Es gibt aber auch noch eine einfachere Möglichkeit, auf das (fast) gleiche Resultat zu kommen. Für den Messwert des Produkts multiplizieren wir die beiden Messwerte miteinander:
\[ x = B\cdot L = 55 \cdot 165\;\mathrm{cm} = 9075\;\mathrm{cm}^2 \qquad(\text{vorher:}\ 9076\;\mathrm{cm}^2) \]
Für die Unsicherheit bestimmen wir zunächst die relative Unsicherheit von Breite
\[ 100 \cdot \frac{\Delta B}{B} = 100 \cdot \frac{1\;\mathrm{cm}}{55\;\mathrm{cm}} = 1{,}82\ldots\,\% \]
und Länge:
\[ 100 \cdot \frac{\Delta L}{L} = 100 \cdot \frac{1\;\mathrm{cm}}{165\;\mathrm{cm}} = 0{,}60\ldots\,\% \]
Wir addieren die relativen Unsicherheiten, um auf die relative Unsicherheit der Fläche zu kommen:
\[ 0{,}60\ldots\,\% + 1{,}82\ldots\,\% = 2{,}42\ldots\,\% \]
Die absolute Unsicherheit der Fläche erhalten wir schließlich mithilfe der relativen Unsicherheit und dem Produkt der Messwerte:
\[ \Delta x = \frac{2{,}42\ldots\cdot 9075\;\mathrm{cm}^2}{100} = 219{,}97\ldots\;\mathrm{cm}^2 \qquad(\text{vorher:}\ 220\;\mathrm{cm}^2) \]
Verallgemeinern wir diese Methode, erhalten wir für die Multiplikation von Messwerten:
| \[\begin{equation} (x+\Delta x) \cdot (y+\Delta y) = (x\cdot y)\pm(x\cdot y)\cdot\left(\frac{\Delta x}{x}+\frac{\Delta y}{y}\right) \tag{2.10} \end{equation}\] |
Und für die Division von Messwerten:
| \[\begin{equation} \frac{(x+\Delta x)}{(y+\Delta y)} = \frac{x}{y}\pm\frac{x}{y}\cdot\left(\frac{\Delta x}{x}+\frac{\Delta y}{y}\right) \tag{2.11} \end{equation}\] |
Bei der Punktrechnung von Messwerten addierst du die relativen Unsicherheiten, um auf die relative Unsicherheit des Ergebnisses zu kommen.
2.5.16 Potenzen von Messwerten
Eine ganzzahlige Potenz ist nur eine Kurzschreibweise für eine Multiplikation.
\[ a^2 = a\cdot a \]
Mithilfe der Formel für die Multiplikation von Messwerten können wir eine Formel für Fehlerfortpflanzung von Messwerten bei Potenzen herleiten, indem wir alle \(y\) durch \(x\) ersetzen:
\[ \begin{aligned} (x+\Delta x)^2 = {} & (x+\Delta x) \cdot (x+\Delta x) \\ = {} & (x\cdot x)\pm(x\cdot x)\cdot\left(\frac{\Delta x}{x}+\frac{\Delta x}{x}\right) \\ = {} & x^2\pm x^2\cdot\left(\frac{\Delta x}{x}+\frac{\Delta x}{x}\right) \\ = {} & x^2\pm x^2\cdot\left(2\cdot\frac{\Delta x}{x}\right) \\ \end{aligned} \]
Verallgemeinern wir das Ergebnis durch eine Potenz \(n\) erhalten wir eine Formel für das Potenzieren von Messwerten:
| \[\begin{equation} (x+\Delta x)^n = x^n\pm x^n\cdot\left(n\cdot\frac{\Delta x}{x}\right) \tag{2.12} \end{equation}\] |
Diese Formel kannst du auch für nicht ganzzahlige Potenzen verwenden. Beim Potenzieren von Messwerten ergibt sich die relative Unsicherheit des Ergebnisses aus der relativen Unsicherheit des Messwerts multipliziert mit der Potenz.
